
Some Past Projects
Autonomous Robotic 3D Scanning for Photorealistic Models of Objects

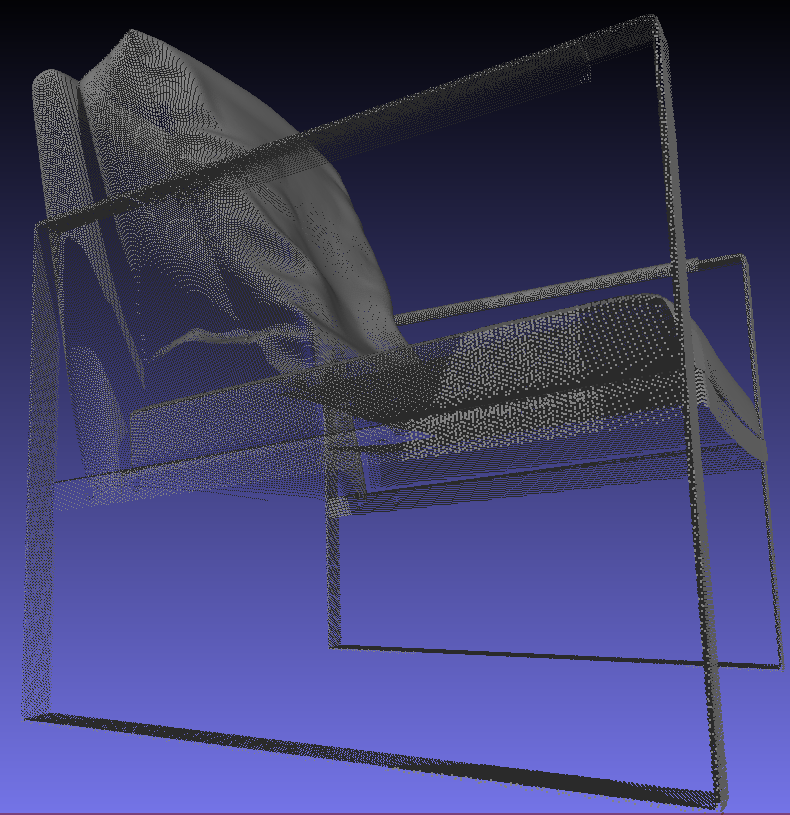
In the context of 3D object scanning, the goal is to measure a 3D object like the brown chair to the left with a physical scanning device, and then process the data collected to construct a model of the object: an asset which can be used in a variety of digital media such as movies, games, or online shopping interfaces.
I'm currently working with 3co on developing an autonomous robotic solution that will offer a way to obtain photorealistic 3D scans of physical objects at the push of a button.
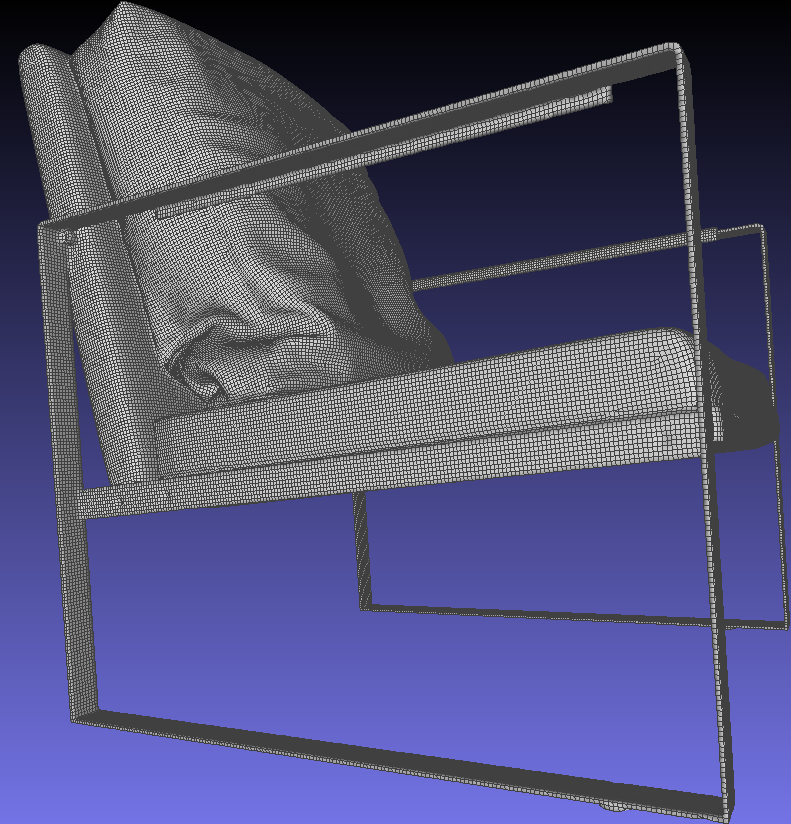
For those interested, I dive into a little more detail about just the surface reconstruction part of the problem in the next section. That is, given a set of range scans in the form of point clouds representing different views of the object, how that can all be neatly integrated into a single coherent mesh like the one on the left.
Surface Reconstruction for Point Cloud Sequences

Here, I'm going to talk about just the geometry part, which is referred to as surface reconstruction, and is a well-studied and arguably "solved" problem in the literature [1].
Meshing individual scans in the sequence is easy, since the perspective used to capture each point cloud naturally imposes a lattice structure, which can be directly iterated through, forming triangles when the maximum side length is under some threshold. The real challenge arises when attempting to merge each individually meshed scan into a single mesh, as there will be overlap in regions that are captured by multiple scans, which must be resolved for the model to be commercially usable:

The literature offers two main ways to tackle this issue. The first is to actually ignore the lattice structure described above, and perform meshing on the entire point cloud containing all measured points directly. While this does throw away information, in some instances it can work well. In particular, variants of Poisson reconstruction [2,3] can achieve extremely accurate results in cases where all surfaces of the object are observed. In cases of completely absent data for certain regions, such as the underside of the leaves in a top-down view of our banana plant, Poisson reconstruction will fail in rather disturbing fashion:
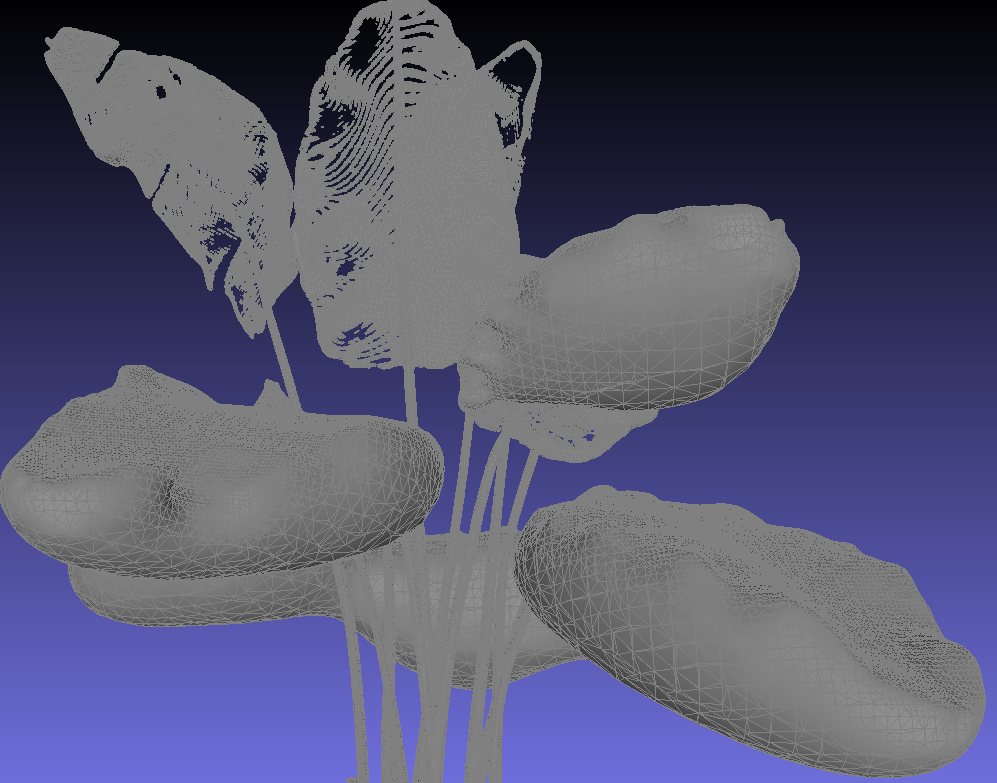
These phantom "bubbles" are the result of Poisson reconstruction's (elegant) treatment of the problem as the optimization of a watertight surface whose surface was sampled to produce the scanned point clouds.
The second family of methods in the literature for handling sets of point clouds collected from differing perspectives treats the problem more directly by growing the mesh at a local level, as opposed to optimizing for a global objective. In particular, the Zippering approach of Turk et. al. [4] meshes the scans individually and then performs decimation in overlapping areas. This would be an ideal solution, except computationally it does not scale well to the higher resolutions 3co works with. To address this issue, Meerits et. al. [5] have reformulated the algorithm to be GPU-friendly, potentially making it computationally viable for higher resolutions. Unfortunately, their code is not publically available for testing, and their results do not appear to construct models at the level of accuracy needed for commercially usable 3D models.
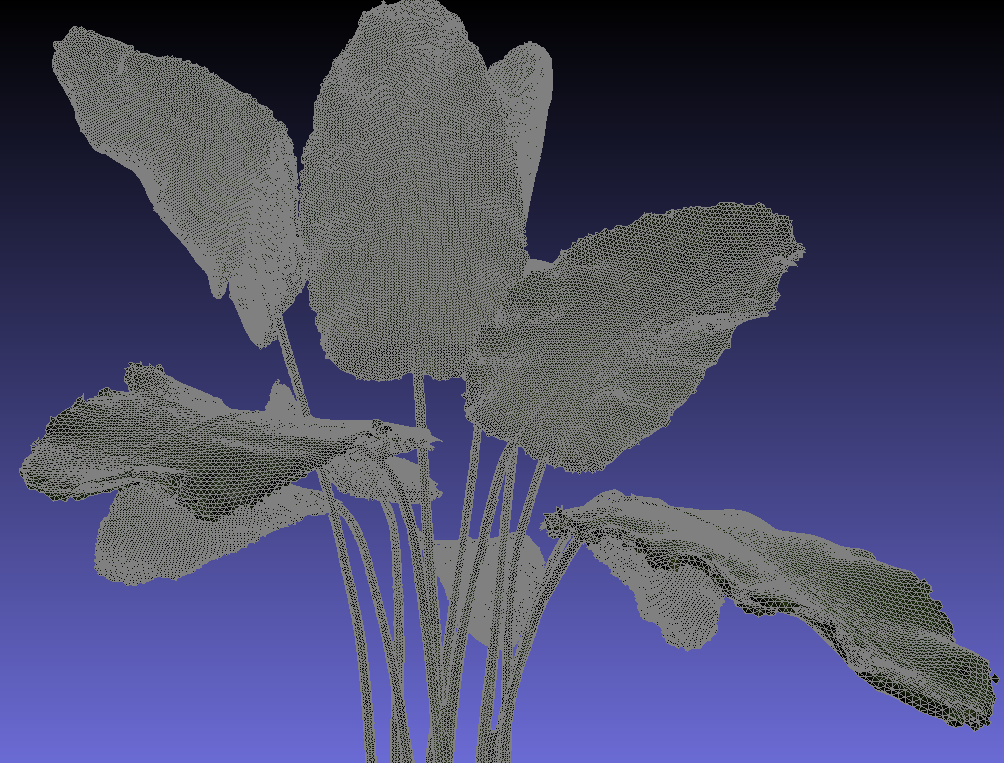
In the end, the best approach for this setting seems to be VRIP, contributed by Curless et. al.[6]. VRIP utilizes the lattice structure of each scan's observations, but instead of individually meshing scans and then merging them, VRIP iterates across voxels in a volumetric representation of the object in an efficient manner that accounts for the knowledge of where free space is given the persective of the scanner across time. An implementation of VRIP with minor extensions called VCG is conveniently included in MeshLab [7], and with a subsequent final step of applying Instant Meshes [8] for compression and clean-up, we get the following quite usable result:
References
[1] Matthew Berger, Andrea Tagliasacchi, Lee Seversky, Pierre Alliez, Gael Guennebaud, et al.. A Survey of Surface Reconstruction from Point Clouds. Computer Graphics Forum, 2016.[2] Kazhdan, M., Bolitho, M., Hoppe, H.: Poisson surface reconstruction. Symposium on Geometry Processing, The Eurographics Association, 2006.
[3] Kazhdan, M., Hoppe, H.: Screened poisson surface reconstruction. ACM Trans. Gr. (TOG), 2013.
[4] Turk, G., Levoy, M.: Zippered polygon meshes from range images. Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques, 1994.
[5] Meerits, S.; Nozick, V.; Saito, H. Real-time scene reconstruction and triangle mesh generation using multiple RGB-D cameras. Journal of Real-Time Image Processing, 2017.
[6] Curless, B., and Levoy, M. A volumetric method for building complex models from range images. SIGGRAPH Proceedings, 1996.
[7] P. Cignoni, M. Callieri, M. Corsini, M. Dellepiane, F. Ganovelli, G. Ranzuglia MeshLab: an Open-Source Mesh Processing Tool. Sixth Eurographics Italian Chapter Conference, 2008.
[8] W. Jakob, M. Tarini, D. Panozzo, and O. Sorkine-Hornung. Instant field-aligned meshes. ACM Transactions on Graphics, Oct. 2015.
Detecting Mines in the Ocean
While working with e-Cortex, I had the pleasure of working alongside computer scientists and cognitive computational neuroscientists, and together delving into the problem of detecting explosive ocean mines in the ocean, using video and sonar data collected by Archerfish: unmanned submarines used to find and destroy sea mines.At the time, a human operator would need to remotely watch the video and sonar feed and guide the archerfish to sweep areas for mines, and ultimately decide when to pull the trigger to destroy a visually confirmed mine. Our task was to automate the mine detection process. In order to do this, we were given several dozen sets of sonar/video feed sequences, each consisting of several minutes of mine-seeking until a mine was eventually spotted. After creating training data by assigning mine/no mine labels to the entire dataset, it was time to train some models.
We expected that a simple image classification approach would suffice for the video data, since upon visual inspection of the video data the mines were fairly easy to discern with the human eye. Our approach was to utilize the image representations learned by Inception [1], a CNN that had been trained for classifcation on a large natural image dataset, by retraining it on our mine sweeping video data. As expected, we achieved accuracy ratings in the upper 90s.
However, mines were only visible up close in the video data. To spot mines from farther away, the sonar data would need to be utilized. When we tried employing the same strategy as with the video data, the network performed about as well as a random classification strategy. It was essentially a garbage-in-garbage-out situation. So, the key to achieving accurate results turned out to be two preprocessing steps unique to this domain.
First, instead of presenting the sonar images in polar coordinates to the network, we transformed them to cartesian space, which allows the convolutional structures and features captured by the network to operate on images more closely resembling the natural images it was pre-trained on.
Second, we utilized pose information of the submarine to align sequences of sonar images instead of looking at them in isolation. By doing this, we were able to drastically reduce the noise present in the sonar data.
Taken together, these two preprocessing steps allowed us to train the network to achieve accuracy in the low 90s for the sonar data.